ESP32轮足机器人
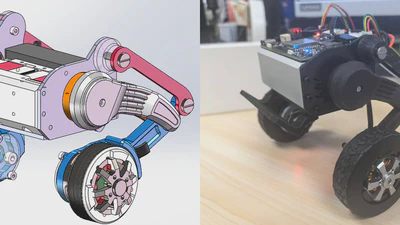
基于 ESP32 微控制器设计并实现了一套桌面级双轮足机器人系统,采用轮足复合结构,通过舵机驱动的可变轮轴高度四连杆机构实现轮式运动与类足姿态调节,并调节整机中心位置结合PID与FOC 控制整机平衡。 整机模型图 腿部(四连杆)机构运动演示 机器人本体使用碳纤维板拼合而成,前护板使用6061铝合金材料,通过配重设计与后部电池配重平衡,调节整机重心位置,方便控 …
基于 ESP32 微控制器设计并实现了一套桌面级双轮足机器人系统,采用轮足复合结构,通过舵机驱动的可变轮轴高度四连杆机构实现轮式运动与类足姿态调节,并调节整机中心位置结合PID与FOC 控制整机平衡。 整机模型图 腿部(四连杆)机构运动演示 机器人本体使用碳纤维板拼合而成,前护板使用6061铝合金材料,通过配重设计与后部电池配重平衡,调节整机重心位置,方便控 …