基于STM32的物料搬运小车
2021年4月8日· ·
1 分钟阅读时长
·
1 分钟阅读时长
韩思源
项目来源于韩思源 2021 年大学生工程训练综合能力竞赛辽宁省一等奖项目。
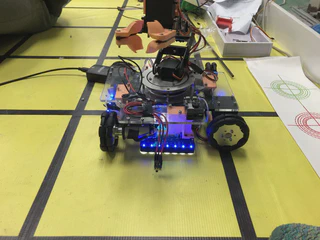
基于 STM32 微控制器设计并实现了一套智能物料搬运小车系统,集成全向移动控制、灰度寻迹、OpenMV 视觉识别及机械臂抓取,实现对不同颜色与形状物料的自主识别与搬运。
设计平行四边形机构机械臂,仅3 自由度(图中为 2 自由度)降低控制难度,同时优化物料夹持方式,使其始终保持与地面水平,提高抓取与摆放成功率。

机械臂设计
完成全向轮移动底盘结构设计,优化整车结构布局。

底盘布局设计

灰度传感器与底盘连接件(58mm 小轮版)

全向轮移动底盘图
根据物料形状设计了多种末端夹爪结构,设计辅助滚轮,增大抓取成功率。

”灯笼“形物料夹爪

比赛图片

{kind=link}