ESP32轮足机器人
基于 ESP32 微控制器设计并实现了一套桌面级双轮足机器人系统,采用轮足复合结构,通过舵机驱动的可变轮轴高度四连杆机构实现轮式运动与类足姿态调节,并调节整机中心位置结合PID与FOC 控制整机平衡。 整机模型图 腿部(四连杆)机构运动演示 机器人本体使用碳纤维板拼合而成,前护板使用6061铝合金材料,通过配重设计与后部电池配重平衡,调节整机重心位置,方便控 …
基于 ESP32 微控制器设计并实现了一套桌面级双轮足机器人系统,采用轮足复合结构,通过舵机驱动的可变轮轴高度四连杆机构实现轮式运动与类足姿态调节,并调节整机中心位置结合PID与FOC 控制整机平衡。 整机模型图 腿部(四连杆)机构运动演示 机器人本体使用碳纤维板拼合而成,前护板使用6061铝合金材料,通过配重设计与后部电池配重平衡,调节整机重心位置,方便控 …
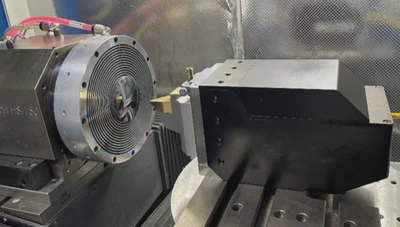
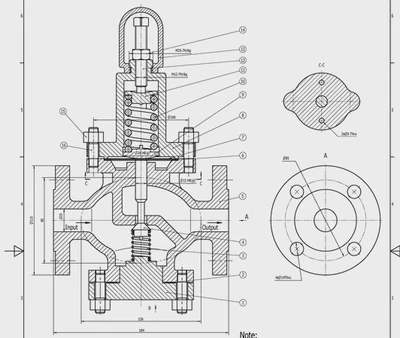
项目来源于韩思源 2024 年大连理工大学机械工程学院的本科毕业设计。 硅铝合金(Sip/Al)由于其比强度高、导热率高、热膨胀系数可控,是电子封装领域的关键材料。 硅铝合金在(1)航天望远镜,(2)电子封装,(3)飞机腹鳍中的应用。 然而 Sip/Al 复合材料作为一种颗粒增强型复合材料,使用传统的单点金刚石切削技术存在硬质点磨损、颗粒从基体剥离、加工表 …
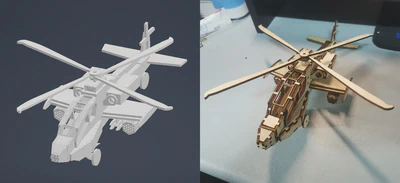
项目来源于韩思源 2022 年工程训练激光切割课程设计。 在课程设备与材料条件下,以 2.4mm 厚木板完成阿帕奇直升机的木质拼插模型设计,并使用激光切割制作。 模型图片 激光切割图纸 实物照片
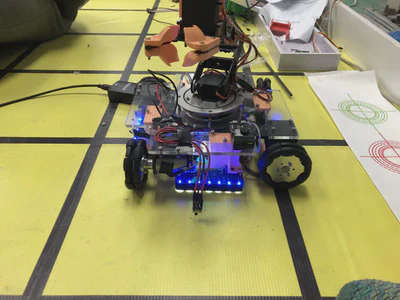
项目来源于韩思源 2021 年大学生工程训练综合能力竞赛辽宁省一等奖项目。 基于 STM32 微控制器设计并实现了一套智能物料搬运小车系统,集成全向移动控制、灰度寻迹、OpenMV 视觉识别及机械臂抓取,实现对不同颜色与形状物料的自主识别与搬运。 设计平行四边形机构机械臂,仅3 自由度(图中为 2 自由度)降低控制难度,同时优化物料夹持方式,使其始终保持与 …